? ? ? ?目前,混合动力汽车仍然是实现汽车节能减排的有效途径之一,而能量管理策略对发挥其节能减排的潜力有着至关重要的影响。当前能量管理策略主要分为两大类: 基于规则能量管理策略和基于最优化能量管理策略。基于优化的控制策略,如动态规划,DP、极小值原理,PMP、随机动态规划,SDP、模型预测控制,MPC、等效燃油消耗最小策略,ECMS等能取得最优的燃油经济性,其中 ECMS 是实时优化策略,最有可能进行实车应用,但计算复杂限制了其在实车中的应用。规则控制策略简单,能应用于实车,但规则制定主要依靠人的经验,控制效果不佳。为克服最优控制和规则控制的缺点,提出了很多有效的方法来优化基于规则的能量管理策略,如利用遗传算法、DP算法、结合基于规则与ECMS的能量管理策略,还有离线生成控制 MAP,通过在线插值实现实时控制。这些方法具有实时性,但是都存在一定的缺陷,因为基于一种或者几种特定工况提取的规则或MAP,鲁棒性不强,一般只是针对特定工况控制效果较好。
? ? ? ?因此,为实现 ECMS 策略实时控制,本项目中在ECMS 控制规律的定性分析基础上,提出几种近似ECMS 算法的自适应规则控制策略,实现与ECMS 策略近似的节油效果,且能克服 ECMS 实时性差的问题。
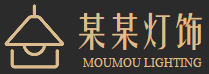
? ? ? ?本项目研究的混合动力电动汽车为一单轴并联式混合动力汽车,其动力系统结构如图1 所示。该并联式 HEV 的动力总成系统主要包括发动机、电机、离合器、传动系及电池。其中,电机直接与离合器的输出和传动系的输入相连。电机转子同时作为转矩耦合器直接使用。因此,省略了机械耦合器,这种车辆动力总成系统结构简单紧凑。这种结构中,电机有发动机启动器、回馈制动中的发电机以及发动机辅助三个功能。这种车辆模型可以在发动机单独驱动、电机单独驱动、混合驱动和回馈制动四种模型下自由切换工作。
? ? ? ?车辆动力系统建模是理解车辆运行规律的第一步。选择能代表车辆动力学和动力系统关键部件特征的参数,准确反映车辆运行规律;同时,减少不必要的参数使用量,提高模型的运算时间。准确的HEV动力学模型可以提高能量管理算法的精度。由于能量管理策略设计与车辆纵向速度正相关,而与车辆其他方向的速度无关,本项目忽略了车辆的横向动力学特性和驾驶稳定性,仅根据车辆纵向动力学来对车辆运动进行建模。根据车辆行驶过程中的动力学平衡关系,作用在车轮上的转矩可表示为:
|
| (1) |
其中,为空气密度;
为整车总质量;
为滚动阻力系数;
为车速;
为空气阻力系数;
为迎风面积;
为道路坡道角;
为旋转质量换算系数;
为车轮半径。
? ? ? ?车轮转矩和发动机转矩以及电机转矩之间的关系为:
|
| (2) |
其中,为传递效率;
为变速器传动比;
为主减速器传动比;
为发动机转矩;
为电机转矩;
为制动转矩。
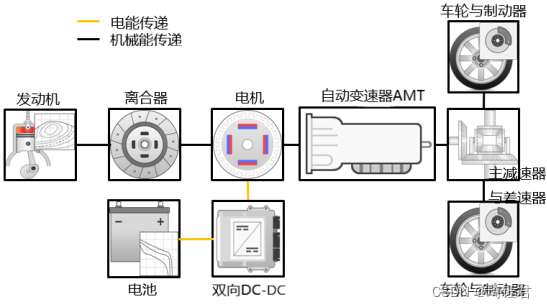
? ? ? ? 本项目发动机采用准静态模型,每个时刻下的油耗可通过查发动机的燃油消耗MAP得到:
|
| (3) |
其中,为燃油消耗率,可通过一定转速和转矩查找准静态发动机万有特性MAP图得到。图2为发动机燃油消耗率特性图。
? ? ? ?电机选用永磁同步电机,在工作过程中既可作为牵引电机提供转矩,也可作为发电机给电池充电,因此电机的功率 可表示为:
|
| (4) |
?其中,为电机效率,可通过一定转速和转矩查找电机准静态效率MAP图得到。图3为电机效率特性图。

? ? ? ?忽略温度对电池的影响,采用Rint模型对电池建模,获得电池SOC和输出功率表达式为:
|
| (5) |
其中,为电池开路电压;
为电池内阻;
为电池功率;
为电池最大容量。
? ? ? ?以最佳燃油经济性为优化目标,性能泛函为:
|
| (6) |
其中,为控制变量;
为瞬时燃油消耗率;
为优化时域;针对单轴并联式HEV,其状态变量
,控制变量
。
? ? ? ?约束条件为:
|
| (7) |
? ? ? ? 上述最优控制问题的汉密尔顿函数为:
|
| (8) |
? ? ? ? ECMS 由极小值原理推导而来,其等效油耗由实际油耗
和与电能相对应的名义油耗
两部分构成,相应的瞬时消耗率亦然:
|
| (10) |
其中,为等效燃油消耗因子,简称等效因子;
为燃油低热值。
? ? ? ?对比式(8)和式(10)可得到协调变量和等效因子之间的对应关系为:
|
| (11) |
2.2.1 等效因子构建——方法一
? ? ? ?根据哈密顿-雅可比-贝尔曼方程,可以得到优化的协调变量:
|
| (12) |
? ? ? 优化目标函数通常包含发动机燃油消耗和电机等效油耗,本文考虑维持电池SOC平衡,可将目标函数写为式:
|
| (13) |
其中,为参考SOC值,
为惩罚因子,
,
为电机平均效率,
为发动机平均效率。目标函数由三部分构成,第一项为发动机燃油消耗量,与电池SOC无关,第二项为电机消耗的能量转化为等效的燃油消耗,第三项为维持电池SOC平衡的惩罚函数。
? ? ? ?式(13)两边分别对SOC进行求导,得到:
|
| (14) |
? ? ? ? 结合式(14)和式(11),可以推导出:
|
| (15) |
? ? ? ?由式(15)可以看出,等效因子调整规则包含两部分:一部分与发动机能量转化效率和电机能量转化效率有关,即。而效率与发动机、电机的工作点有关,不同的工作点对应了不同的效率。因此,要实现对
的精确估计是十分困难的,通常采用平均效率估计等效因子初始值。另一部分是与电池SOC有关,考虑维持电池SOC平衡。若实际SOC值低于参考SOC值,则相应增加等效因子,更多使用燃油,反之,亦然。显然,
与工况有着密切的关系,随着工况的不同,发动机、电机工作点势必不同,导致
发生变化。换言之,当针对某一个工况设计
的能够取得优化结果时,对于另一个工况并非适用。因此,综合考虑工况对等效因子的影响是十分重要的。
? ? ? ?进一步地,对式(15)进行改写,可以得到:
|
| (16) |
其中,为初始等效因子,
,
为常数因子,
为参考SOC。对于本项目的混合动力汽车,参考SOC即初始SOC值。
? ? ? ? 由上面的分析可知,的估计是关键,但是实际过程中难以精确估计出。因此,需对等效因子进行调整。对等效因子的调整既要考虑电池SOC平衡,又要兼顾工况对其的影响,以适应工况的变化。
2.2.2 等效因子构建——方法二
? ? ? ?为使 ECMS 控制策略得到较好的经济性能,等效因子的求解尤为关键。本项目中提出了另一种等效因子计算方法,先根据车辆的动力参数确定初值范围,然后再求其精确值。
? ? ? ?由能量守恒定律可知:
|
| (17) |
其中,和
分别为整个行程过程中消耗的燃油能量和电池能量;
和
分别为完成行程需求的能量和损失的能量。在整个驾驶循环过程中,为减少能量消耗,使能量损失最小,即:
|
| (18) |
? ? ? ?由于是已知量,上式可简化为:
|
| (19) |
? ? ? ?与式(10)对比,可得到:
|
| (20) |
? ? ? ?从上面的推论可知,若SOC未超过其限值,则最优等效因子为 1。然而,在实际推导过程中未考虑SOC的限制,所以计算的值不一定适合。同时,仿真计算发现,当时,电池SOC快速达到其最低限值,当
时,电池的放电率更大,几乎和纯电模式相当,其瞬时燃油经济性不再最优。因此,为获得最优的等效因子,其值应大于等于 1,即?
|
| (21) |
? ? ? ?HEV有 5 种工作模式,可以用控制空间U来表示:
|
| (21) |
其中,?代表发动机单独驱动模式;
代表电机单独驱动模式;
代表混合驱动模式;
代表行车充电模式;
代表制动能量回收模式。
? ? ? ? 假设在某个时刻,且电池SOC达到最大限值
,即
,此时 ECMS 需要找到最优的控制模式
以减小成本函数。于是有:
|
| (23) |
? ? ? ?如果的值太大,
更趋向于
,当
的值无限大,车辆将一直工作在发动机单独工作模式。很显然,太大的
值,不会得到最优的解。因此,电机单独驱动模式或混合驱动模式都有可能使系统能量消耗最低,即:
|
| (24) |
? ? ? ? ?为计算最大值,式(24)将产生两个限值:
和
,则等效因子的上限为:
|
| (25) |
? ? ? ? 求解式( 24)中第一个不等式:
|
| (26) |
?其中,、
、
、
分别为发动机、电机、电机控制器和电池的效率。
? ? ? ?由于式(24)中的第2个不等式相关参数不能消去,故不能确定具体的数值。好在最优的等效因子只须满足式( 24)中任一不等式即可。因此,本项目选择
的值作为最优协调变量的上限。对
的值进行简化,用平均效率来代替实际效率,于是得到最优协调变量的上限为:
|
| (27) |
其中,、
、
、
分别为发动机、电机、电机控制器和电池的平均效率。
? ? ? ? 结合式(21) 和式( 27) ,最优等效因子的界限为:
|
| (28) |
? ? ? ? 故等效因子可以改为:
|
| (29) |
2.2.3 等效因子构建——方法三
? ? ? ?ECMS控制策略中的等效因子对于维持并联混合动力汽车的SOC平衡以及实现最佳燃油经济性起到了至关重要的作用。因此,根据汽车的行驶工况对等效因子进行动态管理,获得当前行驶工况下的最适合的时变等效因子显得尤为重要。时变等效因子可以改为:
|
| (30) |
其中,为 SOC 最小值,?
为 SOC 最大值,
为 SOC 参考值;n为指数系数。
? ? ? ?本项目采用网格化扫描计算方法,即先确定系统约束条件和控制量的取值范围,并且离散化控制变量,求解网格点对应的目标函数可能取值,再求解使得目标函数最小时对应的控制量。具体流程如下:
? ? ?1.?已知发动机转矩外特性、燃油消耗率,电机转矩外特性、电机效率,可分别表示?,
,
,
,
;
? ? ? ?2.? 确定系统的约束条件,分别确定发动机、电机转速范围。相应地,由于发动机、电机特性数据通过试验获得,故通过插值方法求取当前转速点对应的发动机、电机特性数据;
? 3.确定电机转矩的可行域,并且划分为N等份
。N的选择既要保证获得优化解,又减少计算量。若N选择太小,可能得不到优化解;若 N 选择太大,则计算量较大。本文根据电机的转矩范围,综合选取 N=200。然后,获得相应的电机转矩可能取值
(
为驱动需求转矩);
? 4. 计算相应的发动机功率、电机功率
及发动机燃油消耗
;
? ? ?5. 计算相应的等效燃油消耗量; 并求解最小等效燃油消耗量
,获得对应的优化发动机机转矩
,进而根据求出优化的电机转矩
。ECMS求解流程如图4所示。

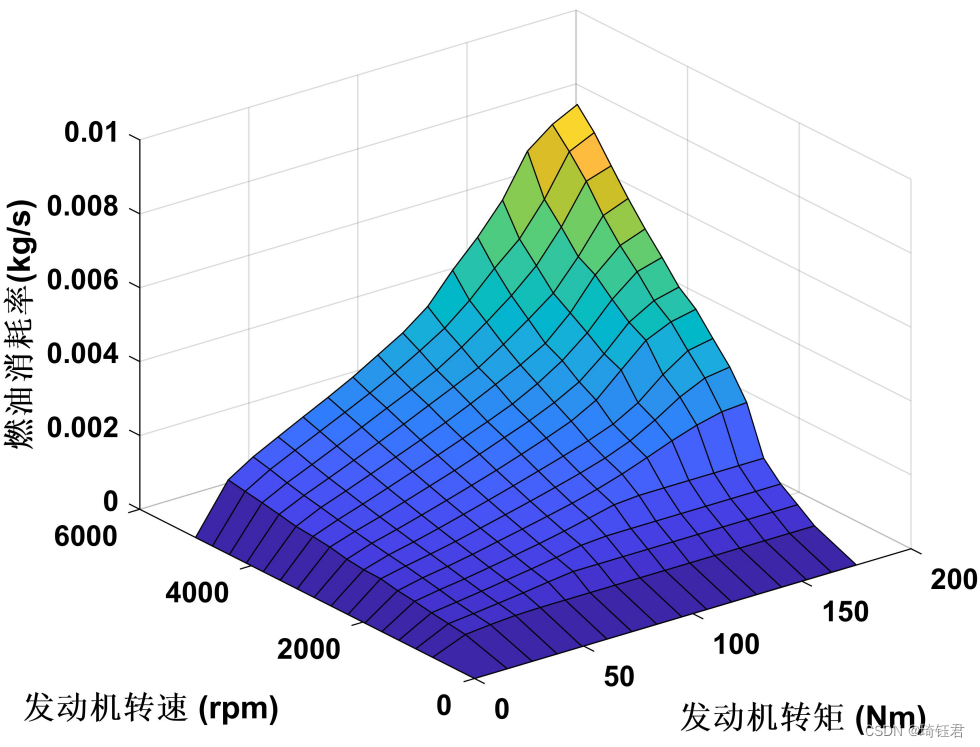
? ? ? ?为验证基于等效燃油消耗最小的能量控制策略的优化效果,以典型循环工况为例进行仿真实验。图5为车速跟随情况曲线。图6?为挡位工作情况。图7为电池SOC运动轨迹。图8为发动机转速工作情况。图9为发动机转矩工作情况。




? ? 由图5-9可见,发动机基本都工作在经济区域,电池SOC保持在一定的范围之内。
? ? ? ?本项目以提高并联式混合动力汽车燃油经济性为目标,根据该系统结构特点和对控制策略的适应性要求,设计了以发动机转矩为控制变量,整车燃油消耗最小为目标的等效燃油消耗最小控制策略,并基于所建模型和策略进行了仿真。仿真结果表明:本项目所提出的控制策略的优化效果良好,发动机运行在高效区域内,电池能量也能保持平衡。
电话:400-123-4567
传 真:+86-123-4567
手 机:13800000000
邮 箱:admin@eyoucms.com
地 址:广东省广州市天河区88号